... weitere Schritte
in 2022 - 2024
zwei und zwei
die ersten Räder
MT18, das Rad im Rad
MT18 mit zwei Armen
MT18 mit drei Armen
Rad 1 Bauplan
Motus in 3D
... die Bahn E
... die Bahn R
Besslers Trick
erste R. Unwuchtsystem
erste Räder Antrieb
bidir. Unwuchtsystem
bidir. Räder Antrieb
zurück zu
...nächste Schritte
zurück zur
Startseite

© 2024 by Alois Zimmermann | Kontakt | Impressum | Updates | Ausblick |
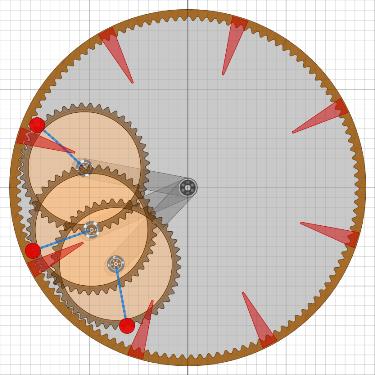
Das Unwuchtsystem der bidirektionalen Räder
Die Animation zeigt die Mechanik eines Hubsystems für ein Fluggewicht
(Hebel mit Ratsche, Satellitenrad und Fluggewicht an einer Feder).
Nach kurzer, starker Beschleunigung gewinnt das Fluggewicht an Schwung und
erreicht dann aus eigener Kraft seine höhere Endposition zum Treiben des Rades.
Das System arbeitet links- und rechtsherum ohne Unterschied.
In den bidirektionalen Rädern waren 3 solche Hubsysteme im Einsatz.
Nach 45° Raddrehung wurde das jeweils nächste aktiv.
Und Bessler würde noch hinzufügen:
„Nicht gezeiget ist woher eigentlich das primum movens kommen sollte.”
|
Den Antrieb in der Animation übernimmt ein Motor in der Achse des Satellitenrades.
Winkelabhängig wird der Motor kurz eingeschaltet, dann folgt der Freilauf und
kurz vor dem Einrasten wird noch abgebremst.
Die Wissenschaftler, die sich mit dem „swing by” von Satelliten auskennen,
sollten spätestens jetzt mal anfangen zu rechnen.
|
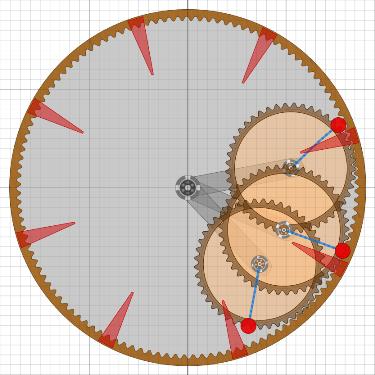
Das Bild links zeigt die 3 Systeme in einem Rad, |
Dass die großen Räder drei Unwuchtsysteme haben sollten war anfangs auch für mich
nicht einfach zu denken.
Aber es hat sich immer mehr angedeutet und bei diesem Entwurf passt einfach alles zusammen.
|
Die großen Räder waren bidirektional und standen |
|
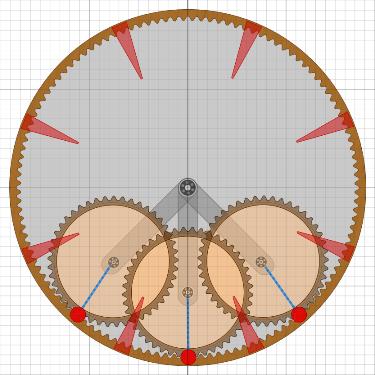
Dieses Bild zeigt die 3 Systeme im Rad, wenn |
Achtung: Weitere Simulationen geben Anlass zu der Vermutung, dass die 8 Rasten
nicht nur nicht vorhanden waren, sondern sogar schädlich gewesen wären.
Sie wurden hier nur noch zur besseren Visualisierung dargestellt.
Damit wird aber auch klar, weshalb hier keine Filzauflagen notwendig waren.
Bei fehlenden Rasten muss der Satellit irgendwie anders an passender Stelle blockiert
werden und das Fluggewicht wird dann noch kurz nach unten nachschwingen.
Von aussen zu hören wäre dann nicht das Aufschlagen auf eine Raste,
sondern das Einrasten des Satelliten in den Hebel.